Practical Introduction
Imagine you’re exploring an uncharted terrain, and your trusty companion is a robot capable of navigating through challenging landscapes. Meet the UGV Beast ROS 2 con Jetson Orin, your new partner in off-road adventures.
What it’s used for and how it works
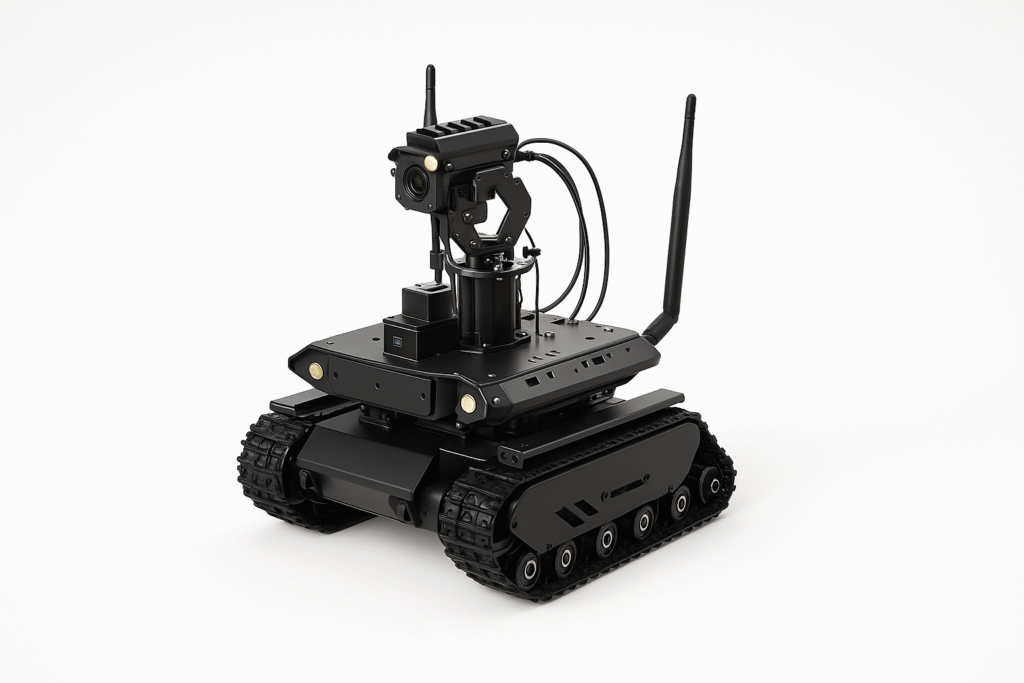
The UGV Beast ROS 2 con Jetson Orin is a versatile mobile robot platform designed for both hobbyists and professionals. It’s an open-source off-road tracked robot that leverages the power of NVIDIA’s Jetson Orin series boards to deliver impressive AI capabilities. This robot is particularly suited for exploration and development in rugged environments, thanks to its robust design and advanced computing power.
First, let’s delve into its applications. The UGV Beast excels in providing a platform for developing and testing autonomous navigation systems. With its high-torque dual-axis pan-tilt system and 360° flexible omnidirectional movement, it can handle complex terrains with ease. Additionally, it supports advanced computer vision tasks, making it ideal for projects involving object detection, mapping, and navigation.
Now, let’s talk about how it works. At its core, the UGV Beast is powered by the Jetson Orin Nano, a compact yet powerful computing module. This module enables high-performance AI processing, which is crucial for tasks such as real-time video processing and machine learning applications. The robot’s dual-controller setup, featuring an ESP32 sub-controller, manages motion control and sensor data processing, ensuring smooth and precise operations.
The UGV Beast’s hardware is built to endure tough conditions. It features a stainless steel chassis with a tracked design, providing excellent off-road capabilities. Its suspension system allows it to traverse uneven terrains while minimizing impacts. Moreover, its power supply system supports continuous operation, thanks to its 3S lithium battery module.
In terms of software, the robot runs on Ubuntu 22.04 with ROS2 Humble LTS. This setup offers a wide array of functionalities and resources for autonomous robotics development. The ROS2 framework allows for modular programming, enabling seamless integration of various sensors and components. The robot’s web application interface facilitates remote control and monitoring, eliminating the need for additional software installations.
The UGV Beast also comes equipped with a 5MP wide-angle camera and a Lidar system, enhancing its ability to perceive its environment. These sensors are instrumental in executing tasks like mapping and navigation. Furthermore, the robot’s real-time video transmission capabilities enable users to observe and interact with it from a distance, making it a valuable tool for research and education.
Key Parameters
Below is a table showcasing some of the typical values for the UGV Beast ROS 2 con Jetson Orin:
| Parameter | Typical Value |
|---|---|
| Dimensions (L×W×H) | 196 × 231 × 286 mm |
| Weight | 2915.5±5 g |
| Pan-Tilt Degrees of Freedom | 2 |
| Servo Torque | 30 kg.cm |
| Camera Field of View | 160° |
| Max Speed | 0.35 m/s |
| Battery Support | 3x 18650 lithium batteries |
Concrete Use Case
Consider a scenario where you’re tasked with developing an autonomous surveillance system for a remote construction site. The UGV Beast ROS 2 con Jetson Orin can serve as a reliable solution. First, you’ll need to configure the robot’s network settings to connect to your local network. Using its web application, you can remotely monitor and control the robot from any device with internet access.
Next, you’ll deploy the robot on-site. Thanks to its rugged design, it can navigate the uneven ground typical of construction areas, avoiding obstacles and capturing real-time footage using its wide-angle camera. With its Lidar and depth camera, the robot can map the environment, providing a detailed layout of the site.
The robot’s AI capabilities enable it to recognize and track specific objects or individuals, making it an effective tool for monitoring site activities. As it patrols, it can send alerts and updates through its web interface, allowing you to respond promptly to any unusual occurrences.
For extended operations, the UGV Beast’s battery system supports continuous use while charging, ensuring that it remains operational throughout its patrols. This feature is particularly valuable in remote areas where frequent battery replacements might be impractical.
Overall, the UGV Beast ROS 2 con Jetson Orin offers a comprehensive solution for autonomous surveillance, combining robust hardware with sophisticated AI and remote monitoring capabilities.
Common Mistakes and How to Avoid Them
- Failing to properly configure network settings: Always verify the network connection before deployment.
- Incorrectly installing batteries: Ensure correct polarity to avoid damage.
- Overlooking software updates: Regularly check for updates to maintain optimal performance.
- Ignoring operational limits: Adhere to the robot’s weight and speed limits to prevent mechanical issues.
- Neglecting environmental conditions: Avoid using the robot in waterlogged areas, as it is not waterproof.
Conclusion + Call to Action
The UGV Beast ROS 2 con Jetson Orin is a powerful tool for exploring the world of autonomous robotics. Whether you’re a beginner or a seasoned developer, this robot provides a solid platform for learning and innovation. With its advanced AI features and robust design, it’s well-suited for a variety of applications. Start your journey into robotics today and see what you can create. More information at electronicsengineering.blog
Official sources
- https://www.waveshare.com/product/ai/robots/mobile-robots/ugv-beast-pt-jetson-orin-ros2-kit.htm
- https://www.waveshare.com/wiki/UGV_Beast_PT_Jetson_Orin_AI_Kit
Quick Quiz
Question 1: What is the main purpose of the UGV Beast ROS 2 con Jetson Orin?
Question 2: Which computing module powers the UGV Beast?
Question 3: What type of movement does the UGV Beast support?
Question 4: What is a key feature of the UGV Beast's hardware design?
Question 5: What additional controller does the UGV Beast use for motion control?
Third-party readings
- Controla tu robot utilizando micro-ROS y el kit NVIDIA Jetson
- Implementación de aplicaciones robóticas con ROS 2 y AI en la plataforma NVIDIA Jetson
- UGV Beast Jetson Orin ROS2 9. Herramienta de control basada en web
Find this product on Amazon
As an Amazon Associate, I earn from qualifying purchases. If you buy through this link, you help keep this project running.